
2024 4th International Conference on Control and Intelligent Robotics (ICCIR 2024) has been successfully held on June 21, 2024
ICCIR 2024 aims to bring together leading academic scientists, researchers, and research scholars to exchange and share their experiences. It also provides the premier multidisciplinary forum for researchers, practitioners, and educators to present and discuss the most recent innovations, trends, and concerns, practical challenges encountered and the solutions adopted in the field of Control and Intelligent Robot. The conference will be held in Sipsongpanna(China).
Group Photos
Speeches of Keynote Speakers
ICCIR 2024 has invited 3 respectable professors as the keynote speakers.
 | 1. Prof. Chun-Yi Su Concordia University, Canada Speech Title: Modeling and Parameters Learning of Dielectric Elastomer Enabled Soft Robots via Data-In-Loop Approach |
 | 2. Prof. Simon X. Yang University of Guelph, Canada Speech Title: Bio-inspired Intelligent Formation Control of MultipleAutonomous Underwater Vehicles |
 | 3. Prof. Yajun Liu South China University Of Technology, China Speech Title: Application scenario-driven intelligent process system R&D and Industrialization |
Oral Presentations
 | 1. Weiwei Wang Shanghai Maritime University, China Speech Title:Navigation planning of AUV based on sonar rangefinder |
 | 2. Hong Hong Sun Yat-sen University, China Speech Title:MUISTS: A MAVLink-based UAV Integrated Security Testing System |
 | 3. Yuan Bian Tianjin University, China Speech Title:Modeling decision model of minimally invasive surgical robot based on multi-objective particle swarm optimization algorithm |
 | 4. Tao Hu China Coal Technology and Engineering Group Shanghai Co., Ltd., China Speech Title: Pedestrian Detection in Underground Coal Mines with an Improved YOLOv7 Algorithm |
 | 5. Xiangchen Liu Shenyang Aerospace University, China Speech Title:Fractional order PID control of length time-varying flexible manipulator based on RBF neural network compensation |
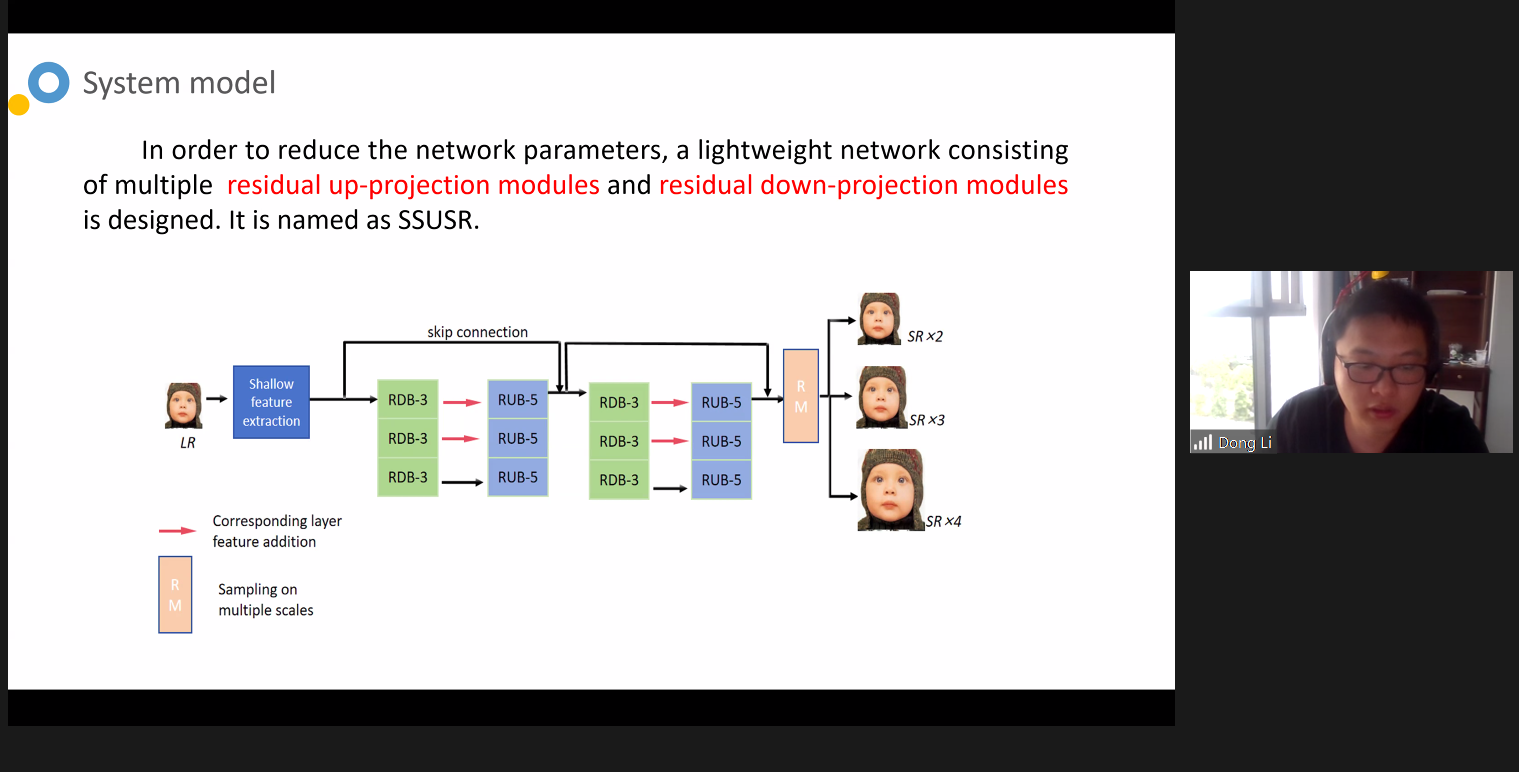 | 6.Silu Yang Chengdu Neusoft University, China Speech Title: U-shaped multilevel feature fusion super-resolution network |
 | 7. Chi Zhang Beijing Institute of Control Engineering, China Speech Title: Data-driven Adaptive Dynamic Programming For Servomechanisms |
 | 8. Yi Lin Chen Dongguan University of Technology, China Speech Title:Traffic Scene Object Detection Based on YOLO Algorithm |
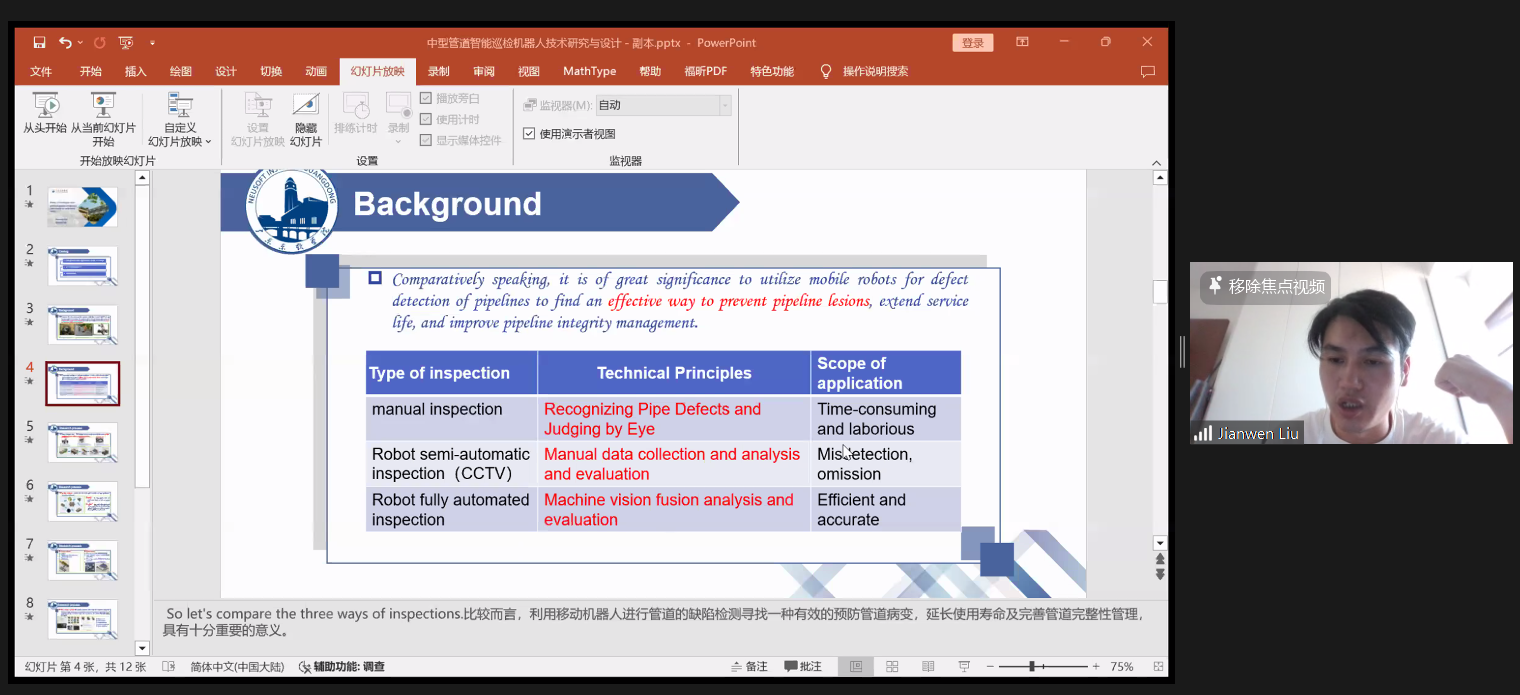 | 8. Jianwen Liu Neusoft Institute Guangdong, China Speech Title: Design of intelligent rain-polluted pipeline inspection robot based on embedded vision |
Closing
The conference focused on the new challenges and new directions facing control and intelligent robotics, and focused on reflecting the latest progress in related technical research in this field. The smooth convening of this conference has extremely promoted the exchange and cooperation between experts and scholars at home and abroad.
